 Fig. 1: 北陽電機株式会社 URG-04LX
Fig. 1: 北陽電機株式会社 URG-04LX2012年度 情報学類 情報科学実験III
レーザ測域センサは、移動ロボットなどの環境認識に用いる、走査式のレーザ距離センサの総称です。 代表的なレーザ測域センサとしては、筑波大学知能ロボット研究室と北陽電機株式会社の共同研究で生まれたURG(アージ)シリーズ(Fig. 1)、SICK社[独]のLMSシリーズや、Leuze社[独]のRSシリーズ、Velodyne社[米]のHDLシリーズがあります。
Fig. 1: 北陽電機株式会社 URG-04LX例えば、北陽電機株式会社のURG-04LXでは、正弦波で変調した赤外線レーザ光を発し、測定対象物からの反射光を受信し、その受信した正弦波の位相遅れを測定することで距離を測定します。そして、このレーザ光を、モータで回転させたミラーで走査することで、周囲240度の20mmから5600mmまでの距離データを取得できます。もう少し詳しい測距方法を知りたい場合は、追加資料を参照して下さい。
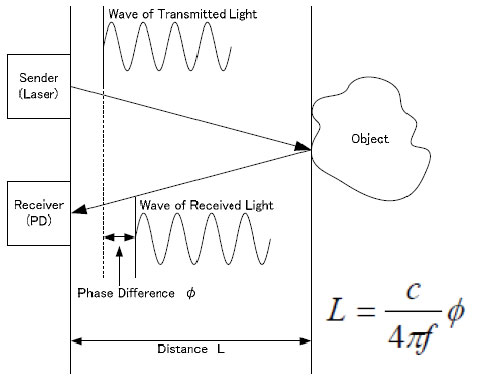 Fig. 2: URG-04LXの測距原理(位相差方式)
Fig. 2: URG-04LXの測距原理(位相差方式)北陽電機株式会社のURG-04LXでは、センサの通信プロトコルとしてSCIP2.0(リンク中の「URG-04LX 通信仕様書 (SCIP 2.0)」を参照)を採用しています。 SCIP2.0は、シリアル通信(RS-232C)や、USB CDC-ACMなどのインタフェースを通して、コンピュータとセンサの間でデータのやりとりを行うためのテキストベースのコマンドで構成されています。
まずは試しにSCIPコマンドを使ってみましょう。ターミナルを2つ開き、並べて下さい。それぞれのターミナルで、以下のコマンドを実行して下さい。(MacOSでは/dev/ttyACM0の部分の名前が異なります。)
$ cat /dev/ttyACM0
$ cat - > /dev/ttyACM0
後者のターミナルでSCIPコマンドを入力すると、前者のターミナルにセンサからの応答が返ってきます。以下のコマンドを入力してみて下さい。
SCIP2.0 VV PP II
それぞれのコマンドで、センサのバージョン情報、測距・走査の情報などが取得できます。続いて、以下のコマンドを入力して下さい。
MD0384038400001
このコマンドは、MD[取得開始角度ステップ(4桁)][取得終了角度ステップ(4桁)][まとめるステップ数(2桁)][間引くスキャン数(1桁)][スキャン回数(2桁)]を意味します。 つまり、384ステップの方向(URG-04LXの正面方向)の距離を、1スキャン分取得する、という意味です。これにより得られた応答は次のような意味を持っています。
MD0384038400001 コマンドエコーバック 00P ステータスコード(00:OK)とチェックサム MD0384038400000 データ送信開始行(後ろ2桁は残りスキャン回数) 99b ステータスコード(99:OK)とチェックサム 3=CCf タイムスタンプ(4桁)とチェックサム 1DhM 距離データ(3桁)とチェックサム
タイムスタンプや距離データは、バイナリの距離データをテキストにエンコードした文字列として取得されます。このテキストのデコード方法について詳しく知りたい場合は、前述のSCIP2.0の資料を参照して下さい。
センサとの通信を確立したり、SCIPコマンドの応答をデコードして数値に直す処理をいちいち実装するのは面倒ですので、ライブラリを使って簡単に距離データを取得しましょう。 libscip2awdを使う場合は、以下のようなソースコードで距離データが取得できます。
#include <stdio.h>
#include <unistd.h>
#include <sys/time.h>
#include <signal.h>
#include <math.h>
#include <scip2awd.h>
int escape;
void ctrlc( int notused )
{
// MDコマンドを発行したままプログラムを終了すると、
// 次回起動時に少し余分に時間がかかる
escape = 1;
signal( SIGINT, NULL );
}
int main( int argc, char *argv[] )
{
S2Port *port; // ポート
S2Sdd_t buf; // データ取得用ダブルバッファ
S2Scan_t *scan; // データ読み出し用構造体
S2Param_t param; // センサのパラメータ構造体
int ret;
if( argc != 2 )
{
fprintf( stderr, "USAGE: %s device\n", argv[0] );
return 0;
}
// ポートを開く
port = Scip2_Open( argv[1], B0 );
if( port == 0 )
{
fprintf( stderr, "ERROR: Failed to open device.\n" );
return 0;
}
printf( "Port opened\n" );
// 初期化
escape = 0;
signal( SIGINT, ctrlc );
S2Sdd_Init( &buf );
printf( "Buffer initialized\n" );
// URGのパラメータ取得
Scip2CMD_PP( port, ¶m );
// URG-04LXの全方向のデータを取得開始
Scip2CMD_StartMS( port, param.step_min, param.step_max,
1, 0, 0, &buf, SCIP2_ENC_3BYTE );
while( !escape )
{
ret = S2Sdd_Begin( &buf, &scan );
if( ret > 0 )
{
int j;
// 新しいデータがあった時の処理をここで行う
printf( "Front distance: %d mm\n",
scan->data[ param.step_front - param.step_min ] );
// 処理例:スキャンしたデータをxy座標(m単位)に変換
for( j = 0; j < scan->size; j ++ )
{
float x, y;
float scan_theta;
// scan->data[j]はmm単位の距離を表し、
// 20mm以下の距離は測距エラーを意味する
if( scan->data[j] < 20 ) continue;
scan_theta = M_PI * 2.0 * ( j - ( param.step_front - param.step_min ) ) /
param.step_resolution;
// URGが上下逆についている場合は、scan_theta = -scan_theta;
x = scan->data[j] * 0.001 * cos( scan_theta );
y = scan->data[j] * 0.001 * sin( scan_theta );
// このx,yやscan->data[]の値を上手く使って処理を行う
}
// S2Sdd_BeginとS2Sdd_Endの間でのみ、構造体scanの中身にアクセス可能
S2Sdd_End( &buf );
}
else if( ret == -1 )
{
// 致命的なエラー時(URGのケーブルが外れたときなど)
fprintf( stderr, "ERROR: Fatal error occurred.\n" );
break;
}
else
{
// 新しいデータはまだ無い
usleep( 10000 );
}
}
printf( "\nStopping\n" );
ret = Scip2CMD_StopMS( port, &buf );
if( ret == 0 )
{
fprintf( stderr, "ERROR: StopMS failed.\n" );
return 0;
}
printf( "Stopped\n" );
S2Sdd_Dest( &buf );
printf( "Buffer destructed\n" );
Scip2_Close( port );
printf( "Port closed\n" );
return 1;
}このサンプルプログラムをコンパイルする際には、以下のようなコンパイルオプションと実行時の引数が必要です。
$ gcc test.c -o test -lscip2awd -lypspur -lpthread -lm $ ./test /dev/ttyACM0
また、上記のサンプルプログラムは、ポーリング型の処理を行っていますが、コールバック型の処理も可能です。 コールバック型のプログラムにしたい場合は、libscip2awd/sample/test-ms-callback.c のサンプルプログラムを参考にして下さい。
Failed to load shared libraryというエラーが出る場合は以下のコマンドを入力して下さい。
$ sudo su - # echo "/usr/local/lib" > /etc/ld.so.conf.d/lib64.conf # echo "/usr/local/lib64" >> /etc/ld.so.conf.d/lib64.conf # ldconfig # exit
ロボットに壁追従させる最も簡単な方法は、以下の図のようなアルゴリズムになります。
どうしてFSコマンドを使用するのか、少し考えてみましょう。
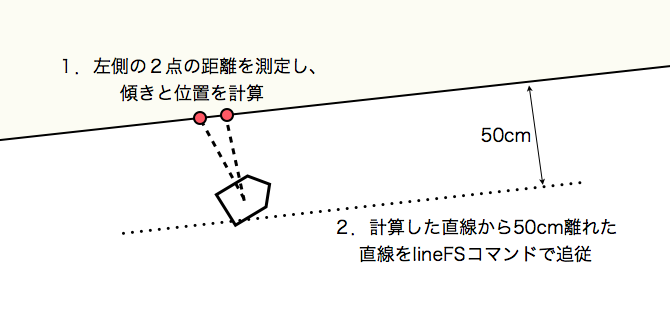
ロボットを壁追従させるのに、この方法は必ずしも良い方法ではありません。色々なアルゴリズムが考えられるので、余裕がある人はこれ以外の方法を考えてみましょう。
TAに見てもらってください。